Разлика између ГПС-а и ДГПС-а

Садржај
ГПС и ДГПС су сателитски навигациони системи. Основна разлика између ГПС-а и ДГПС-а лежи у њиховој тачности, ДГПС је тачнији од ГПС-а. ДГПС је намерно дизајниран да смањи деградацију сигнала.
ГПС обезбеђује тачност око 10 метара, али ДГПС може да обезбеди тачност око 1 метар, чак и преко тих 10 цм.
- Упоредни графикон
- Дефиниција
- Кључне разлике
- Закључак
Упоредни графикон
| Основе за поређење | ГПС | ДГПС |
|---|---|---|
| Број коришћених пријемника | Само један, тј. Самостални ГПС пријемник | Два, Ровер и стационарни пријемници |
| Тачност | 15-10 м | 10 цм |
| Палета инструмената | Глобал | Локални (у кругу од 100 км) |
| Трошак | Повољан у поређењу са ДГПС-ом | Скупо |
| Фреквенцијски опсег | 1,1 - 1,5 ГХз | Зависно од агенције |
| Фактори који утичу на тачност | Селективна расположивост, сателитски такт, атмосферски услови, ионосфера, тропосфера и мултипатх. | Удаљеност између предајника и ровера, ионосфере, тропосфере и вишеструке стазе. |
| Коришћен временски координатни систем | ВГС84 | Локални координатни систем |
Дефиниција ГПС-а
Глобал Поситионинг Систем (ГПС) пружа тачан положај објекта на земљи. Користи правовремене сигнале које генеришу сателити који се окрећу око земље. ГПС укључује сазвежђе од 24 сателита и додатни за резервне сврхе. Четири сателита се користе за постизање прецизног положаја, а овај поступак је познат и као трилатерација.
ГПС технологија користи самосталне пријемнике, где се локација директно израчунава. Ова техника је склона грешкама као што су неисправљене грешке сателитског сата, грешке у орбиталним параметрима, кашњење ионосфере и тропосфере, вишеструке грешке, геометријске грешке и грешке у одабиру датума. Да би се смањиле ове грешке, развијају се нове технологије. ГПС може добити номиналну тачност од 10-15 метара.
Дефиниција ДГПС
Диференцијални систем глобалног позиционирања (ДГПС) је побољшање ГПС-а. ДГПС технологија може постићи тачност до 10 цм. Смањује или уклања деградацију сигнала, што резултира побољшањем тачности. Циљ диференцираног ГПС-а није да иде директно на локацију; радије проналази локацију у односу на фиксну референтну тачку. ДГПС се ослања на два пријемника ровер и референтни пријемник, ровер је корисник, а референтни пријемник је такође познат као стационарни пријемник.
Стационарни пријемник је фиксиран, а његов положај је познат систему. Информације о сателиту непрекидно се усмјеравају према роверу и кули базне станице. Торањ базне станице користи свој познати положај за израчунавање тачног времена. Стационарни пријемник садржи информације ровер пријемнику да исправи мјерења помоћу релативног положаја стационарног пријемника.
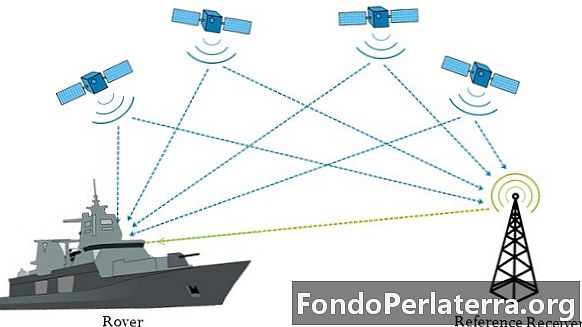
- У ГПС-у постоји самостални пријемник који прима сигнале са сателита, док у ДГПС постоје два пријемника, референтни пријемник и ровер (корисник), где ровер прима калибрирани сигнал од референтног пријемника (фиксна базна станица).
- Тачност ГПС система је око 15 метара. Са друге стране, ДГПС је тачнији и може да постигне тачност до 10 цм.
- ГПС инструменти покривају широк домет и могу се глобално користити док ДГПС инструменти покривају кратак домет до 100 км, али тај опсег се може мењати у складу са фреквенцијским опсегом.
- ГПС систем је јефтинији у поређењу са ДГПС системом.
- Фреквенција сигнала коју сателити преносе у ГПС-у се креће између 1,1 до 1,5 ГХз. Супротно томе, у ДГПС сателити не преносе фиксни домет фреквенције, преносена фреквенција зависи од агенција.
- Чимбеници који утичу на тачност ГПС система су селективна расположивост, сателитски такт, атмосферски услови, ионосфера, тропосфера и мултипатх. Супротно томе, на систем ДГПС утиче удаљеност између предајника и ровера, ионосфере, тропосфере и више пута, али у мањем обиму.
- ГПС користи временски координатни систем ВГС84 који је земаљски фиксни земаљски систем, оријентисан на земљу и геодетски податак. За разлику од ДГПС-а користи локални координатни систем.
Закључак
Диференцијални систем глобалног позиционирања (ДГПС) је тачнија технологија од претходног система глобалног позиционирања (ГПС). Точност у ДГПС-у побољшана је употребом два пријемника уместо једног, који проналази тачну локацију помоћу релативних положаја.





